HƯỚNG DẪN ĐẤU NỐI PLC SIEMENS S7-1200 VỚI DRIVER STEP TB6600
Th12
📘 HƯỚNG DẪN ĐẤU NỐI PLC SIEMENS S7-1200 VỚI DRIVER STEP TB6600
Phân tích PULSE – DIR – Pull-down và các lỗi thường gặp
Tác giả: Factory Automation
1️⃣ Giới thiệu
Trong các hệ thống tự động hóa sử dụng động cơ bước, driver TB6600 là một trong những lựa chọn phổ biến nhờ giá thành tốt, dễ sử dụng và tương thích cao với PLC.
Tuy nhiên, trong quá trình đấu nối PLC Siemens S7-1200 DC/DC/DC với TB6600, rất nhiều người gặp lỗi:
-
Motor chỉ chạy một chiều
-
Chạy được lúc đầu, sau đó mất chiều đảo
-
DIR có tín hiệu nhưng driver không nhận
Nguyên nhân chủ yếu đến từ việc đấu sai PULSE/DIR hoặc hiểu sai về pull-down điện trở. Bài viết này sẽ giải thích từ nguyên lý → cách đấu đúng → tránh lỗi 100%.
2️⃣ Nguyên lý điều khiển PULSE / DIR của TB6600
TB6600 điều khiển động cơ bước theo nguyên tắc:
-
PULSE (STEP)
→ Mỗi xung tương ứng 1 bước của motor -
DIR (Direction)
→ Xác định chiều quay (thuận / nghịch)
⚠️ DIR KHÔNG làm motor quay
👉 PULSE mới là tín hiệu bắt buộc để motor chạy
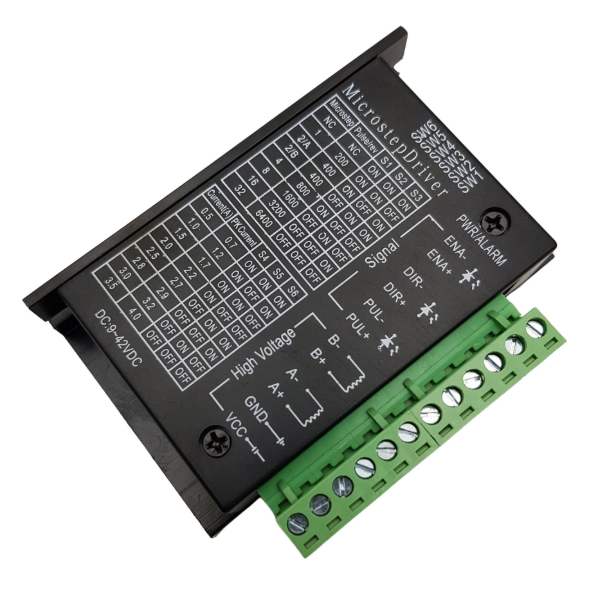
Cấu trúc ngõ vào TB6600
-
PUL+ / PUL- → Opto nhận xung
-
DIR+ / DIR- → Opto nhận chiều
-
ENA+ / ENA- → Enable (tùy dùng)
TB6600 nhận DÒNG qua opto, không đơn thuần là nhận điện áp.
3️⃣ Cách đấu chuẩn PLC S7-1200 DC/DC/DC với TB6600
Giả sử cấu hình:
-
Q0.0 = PULSE (PTO)
-
Q0.5 = DIR
-
PLC xuất transistor PNP 24V
-
Dùng chung mass (0V)
🔹 Đấu PULSE (BẮT BUỘC)
📌 Không mắc điện trở nối tiếp trên PULSE
🔹 Đấu DIR (có pull-down)
👉 Điện trở pull-down giúp DIR luôn về 0V chắc chắn khi PLC OFF, tránh nhiễu.
4️⃣ Pull-down là gì? Vì sao KHÔNG mắc nối tiếp?
❌ Sai lầm rất hay gặp
❗ Đây là đấu sai nghiêm trọng
❓ Vì sao sai?
-
TB6600 dùng opto LED
-
Điện trở nối tiếp → giảm dòng
-
Opto không đủ dòng → mất xung, lỗi chiều
📌 Điện trở KHÔNG BAO GIỜ mắc nối tiếp PULSE hoặc DIR
✅ Pull-down đúng là gì?
-
Điện trở kéo tín hiệu về 0V
-
Mắc song song từ PUL+/DIR+ xuống M
👉 Pull-down chỉ làm việc khi tín hiệu OFF, không ảnh hưởng khi ON.
5️⃣ Vì sao motor chỉ chạy 1 chiều dù có DIR?
Các nguyên nhân phổ biến:
🔸 1. DIR bị “floating”
-
Dây dài
-
Nhiễu từ motor / biến tần
-
Không có pull-down
👉 Khắc phục: gắn pull-down 2.2k–4.7k
🔸 2. Đổi DIR khi PULSE đang chạy
TB6600 yêu cầu:
-
DIR phải ổn định trước khi phát xung
❌ Đổi DIR ngay khi motor đang chạy → driver bỏ qua chiều mới
✅ Trình tự đúng:
-
Stop PULSE
-
Delay 20–50 ms
-
Đổi DIR
-
Delay 20–50 ms
-
Chạy lại PULSE
🔸 3. DIR bị ghi ở nhiều nơi trong chương trình
-
DIR dùng chung Q với logic khác
-
PTO chiếm output nhưng logic thường vẫn ghi
👉 Kiểm tra Online Q0.5 có đổi thật không
6️⃣ Có cần pull-down cho PULSE không?
👉 Thông thường KHÔNG CẦN
Chỉ nên cân nhắc khi:
-
Dây PULSE > 3–5 m
-
Môi trường nhiễu cao
-
Motor rung / mất bước
Nếu cần:
⚠️ Luôn ưu tiên DIR trước
7️⃣ Checklist đấu nối chuẩn (rất quan trọng)
✅ PUL+ từ PTO
✅ PUL- & DIR- chung M (0V)
✅ DIR+ có pull-down
✅ Không mắc điện trở nối tiếp
✅ DIR không bị dùng nhiều chỗ
✅ Đổi DIR khi đã stop xung
8️⃣ Kết luận
PULSE là tín hiệu tạo chuyển động, DIR chỉ chọn chiều.
Q → PUL+/DIR+ đi thẳng, điện trở chỉ kéo xuống M.
Không bao giờ mắc điện trở nối tiếp.
Hiểu đúng nguyên lý này sẽ giúp:
-
Motor chạy ổn định
-
Đảo chiều chính xác
-
Tránh lỗi “chạy 1 chiều” rất phổ biến với TB6600
- [HMI & PLC] HƯỚNG DẪN CÀI ĐẶT PHẦN MỀM EB8000 WEINVIEW – DÒNG TK6070 & TK8070
- CHƯƠNG TRÌNH HỖ TRỢ HUẤN LUYỆN AI NHẬN DIỆN VẬT THỂ (YOLO) TỪ A–Z
- DOWNLOAD TIA PORTAL V17 – HƯỚNG DẪN CÀI ĐẶT – LINK DOWNLOAD FULL CRACK
- HƯỚNG DẪN GIAO TIẾP MODBUS RTU VỚI PLC MITSUBISHI
- HƯỚNG DẪN ĐẤU NỐI PLC SIEMENS S7-1200 VỚI DRIVER STEP TB6600
Bài viết cùng chủ đề:
-

CHƯƠNG TRÌNH HỖ TRỢ HUẤN LUYỆN AI NHẬN DIỆN VẬT THỂ (YOLO) TỪ A–Z
-

HƯỚNG DẪN GIAO TIẾP MODBUS RTU VỚI PLC MITSUBISHI
-

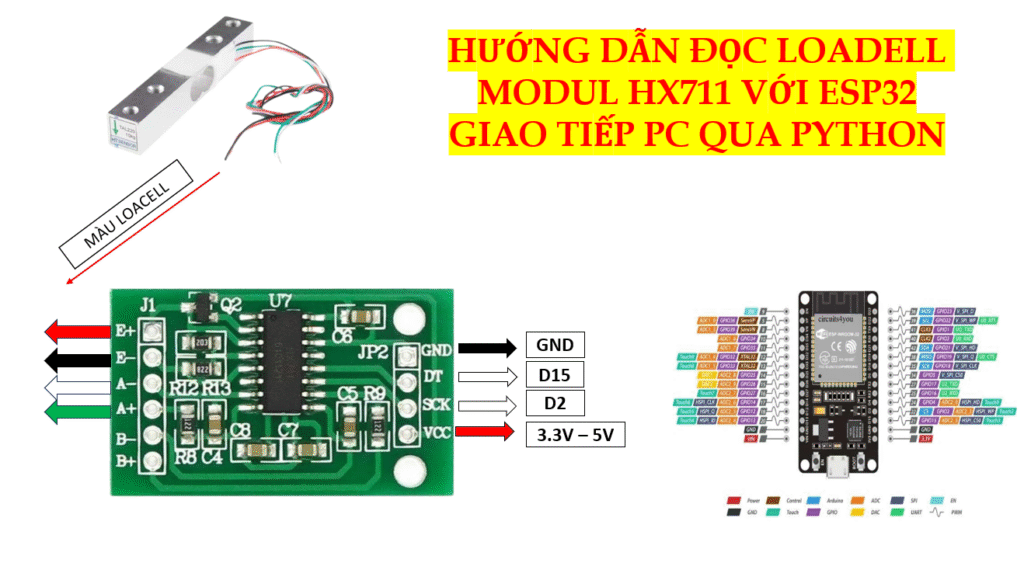
HƯỚNG DẪN ĐỌC GIÁ TRỊ LOADCELL QUA HX711 VỚI ESP32 & GIAO TIẾP PC
-

CAMERA APP YOLO – GIẢI PHÁP CHỤP ẢNH CHUẨN 640×640 CHO TRAINING YOLO
-

EPSON ROBOT BASIC – SOFTWARE TRAINING
-

HƯỚNG DẪN GIAO TIẾP PLC SIEMENS VỚI PYTHON (Snap7 + PyQt5)
-

Module 16 IN 16 OUT RS485 Modbus RTU – Hướng Dẫn Kết Nối & Điều Khiển Chi Tiết
-

TÀI LIỆU ĐIỀU KHIỂN ĐỒNG TỐC 2 ĐỘNG CƠ SERVO TỐC ĐỘ CAO
-

HƯỚNG DẪN CÀI ĐẶT QT DESIGNER 5 CHO PYTHON – TUTORIAL CHI TIẾT